


Abstract
We propose a new way to train a structured output prediction model. More specifically, we train nonlocal data terms in a Gaussian Conditional Random Field (GCRF) by a generalized version of gradient boosting. The approach is evaluated on three challenging regression benchmarks: vessel detection, single image depth estimation and image inpainting. These experiments suggest that the proposed boosting framework matches or exceeds the state-of-the-art. |
Method
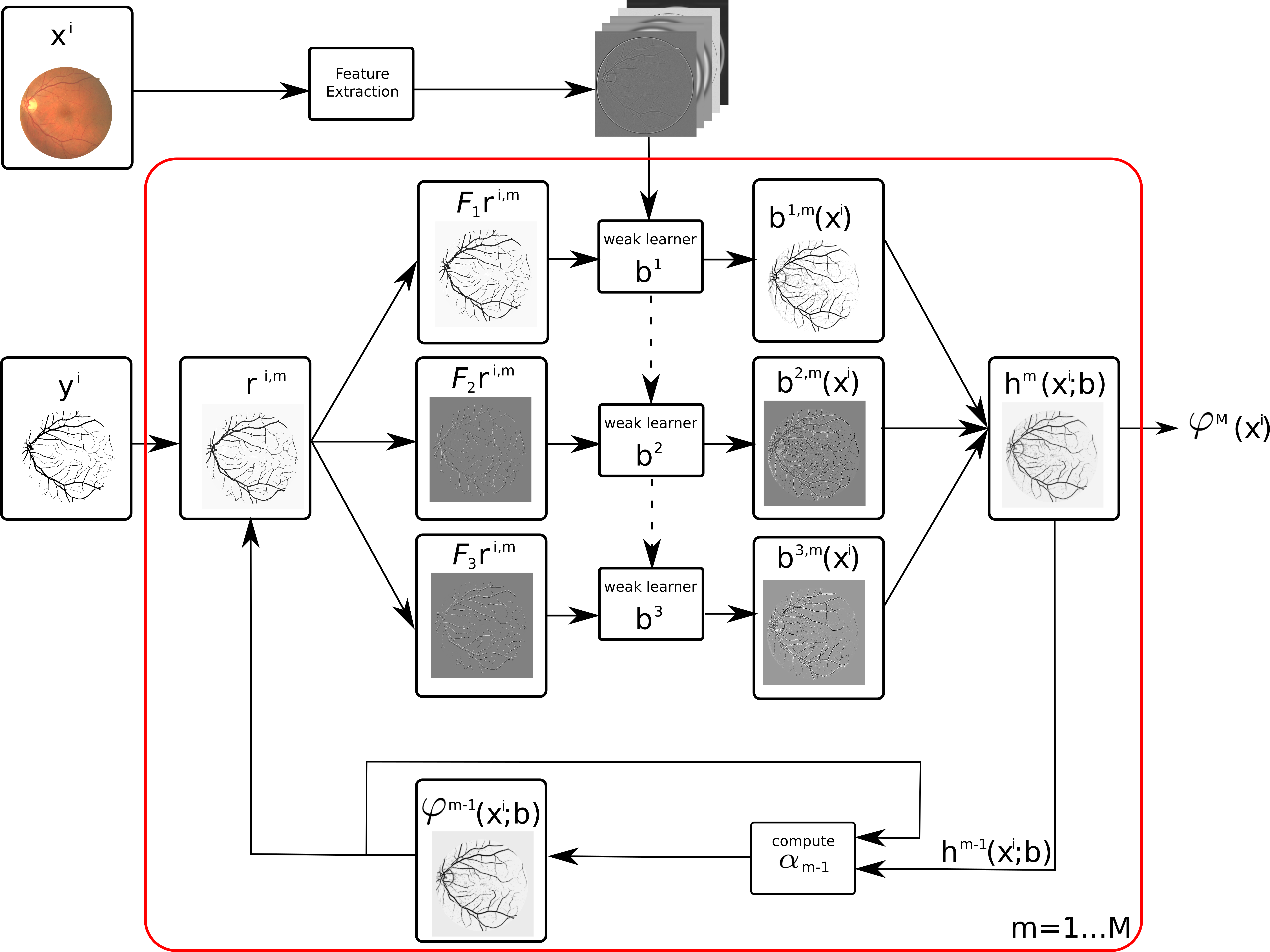 |
Structured regression gradient boosting. Given input \(x^i\)and structured ground truth \(\mathrm{y}^i\), we iterate the following: given the current prediction \(\varphi^{m-1}(\mathrm{x}^i)\), compute gradient \(\mathrm{r}^{i,m}\) of the structured loss. Next, train shallow regression trees that produce good fits \(\mathrm{b}^{k,m}\) to the structured loss gradient image and filtered versions thereof. Use these fits to parametrize the data terms of a Gaussian conditional random field. Its MAP solution \(\mathrm{h}^m(\mathrm{x}^i)\) is added to the current strong structured learner with a weight \(\alpha_m\) found through line search. Repeat \(M\) times. |
Temporal evolution of the prediction |
Learned negative gradient direction |
|
|
Experiments
Depth Estimation | |
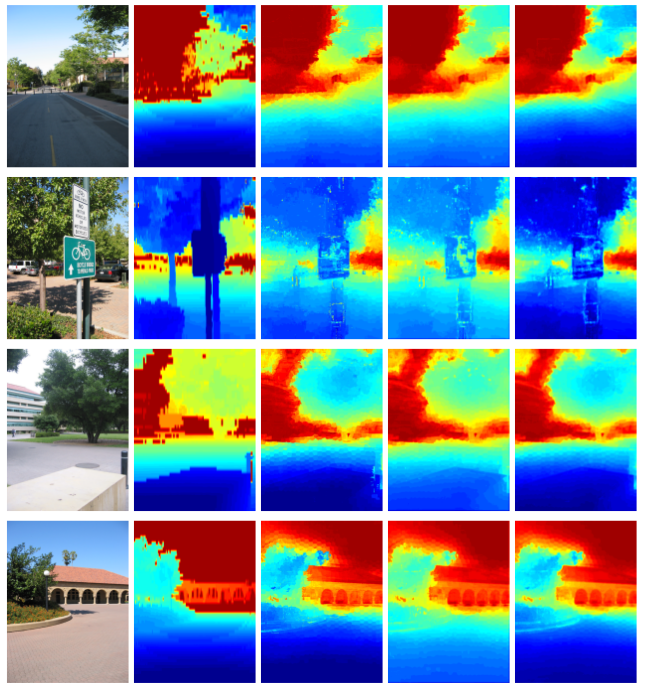 Examples of depth predictions on the Make3D dataset. From left to right: original image, ground truth, gradient boosting baseline ($K=1$), our gradient boosting with pairwise connectivity ($K=3$) and our approach with pairwise connectivity and with the data term computed from a fully connected 5$\times$5 neighborhood ($K=27$). The gradient boosting gives rather coarse prediction mainly due to the coarse depth estimations used as features. In contrast, our full model yields much better predictions. |
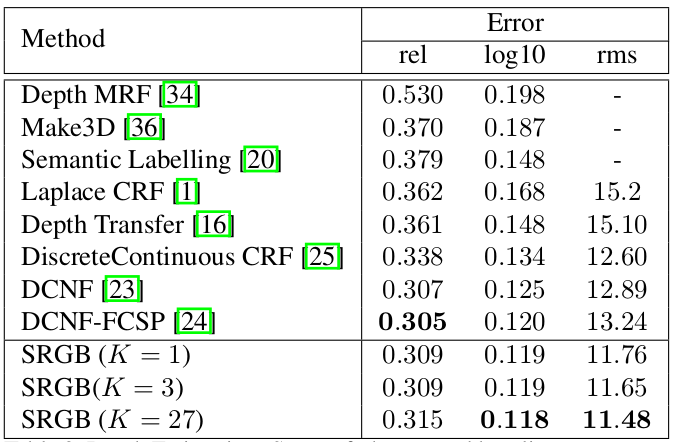 State-of-the-art and baseline comparisons on the Make3D dataset. |
Chinese Character Inpainting | |
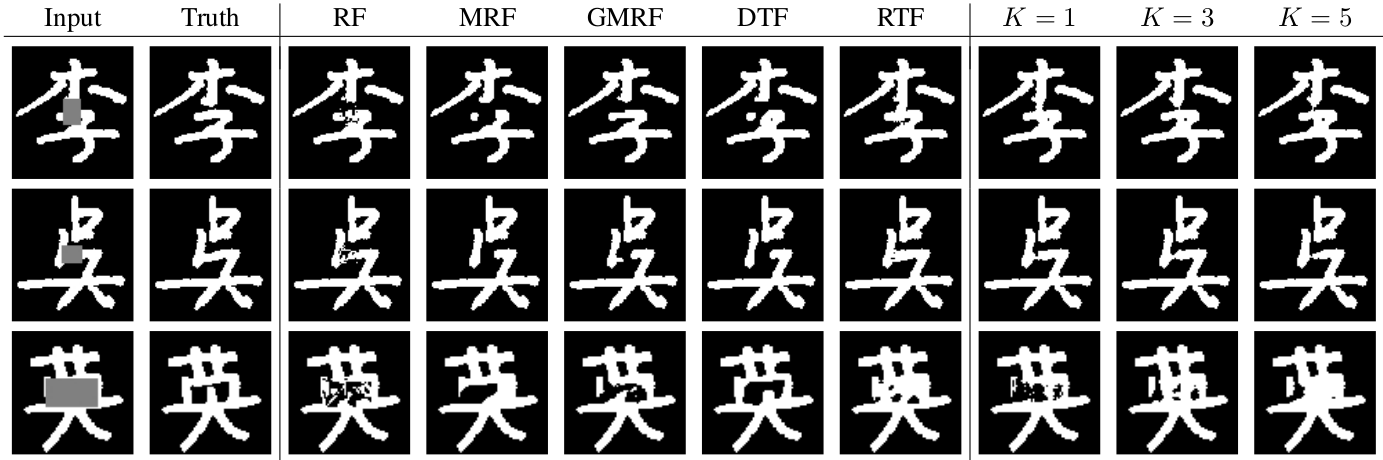 Chinese characters with large occlusions: inpainting result on test set. All the characters are also shown in [14, Fig. 7]. | |
 Accuracy for inpainting of small occlusions. |