


Abstract
In this chapter we introduce a novel method for precise vehicle geolocation based on image sequences acquired by an on-board camera. The key idea is to first drive along the roads of a certain area in order to build a topological map made of sequences of successive frames. At the same time, to each frame we associate the vehicle's spatial position as given by some precise positioning device like a differential GPS or a Real-Time-Kinematic GPS receiver. Afterwards, when driving again on this area, we match on-line every frame of the newly acquired video sequence with some frame of the topological--map, thus being able to retrieve the vehicle's precise position. This matching is based, as commented before, on an efficient image retrieval technique and the assumptions that the vehicle follows an smooth trajectory and its motion is also smooth. More specifically, the vehicle's motion is modeled as a subset of successive frames, transferring the motion's constraints into the frame correspondence. Thus, we do not simply try to perform an image retrieval on the topological map (the collection of sequences) but to align the recent past of the sequence that the camera is presently recording to some subset of the topological map. And we do it on-line, that is, upon the arrival of every new frame (in contrast to batch processing) the MAP inference is recalculated by means of an efficient and precise algorithm, max--product inference on a Markov chain. |
|
Results
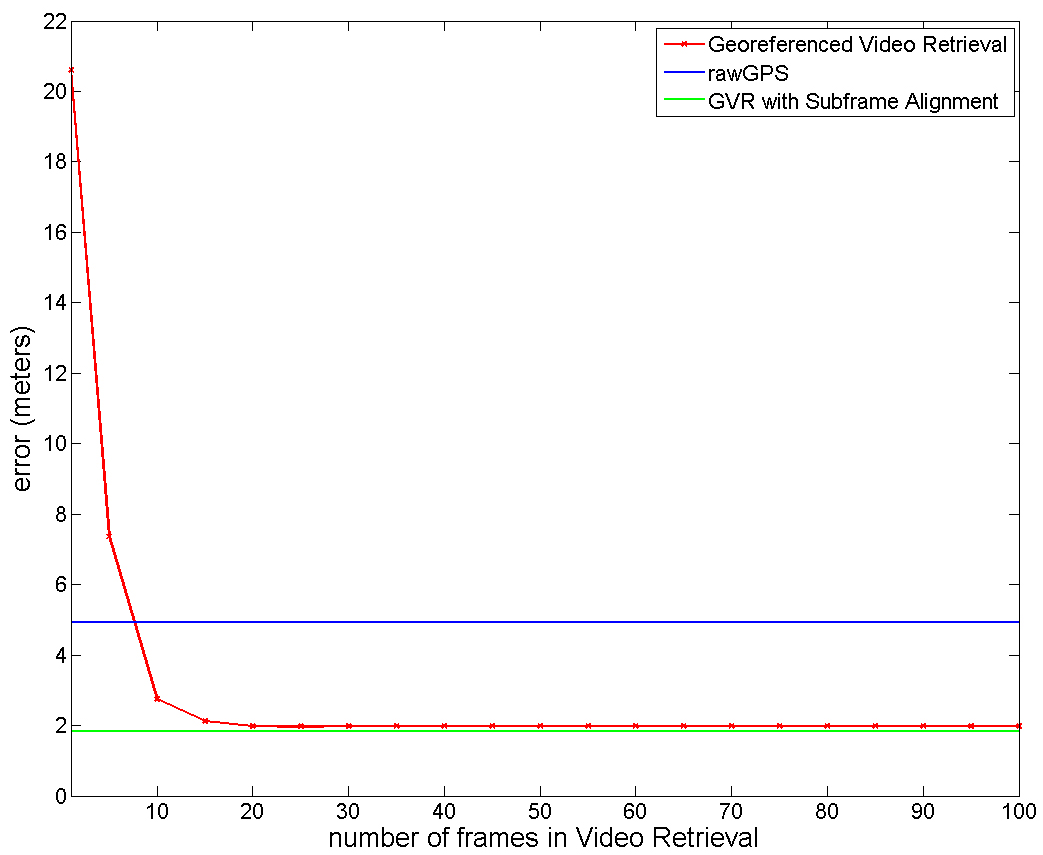
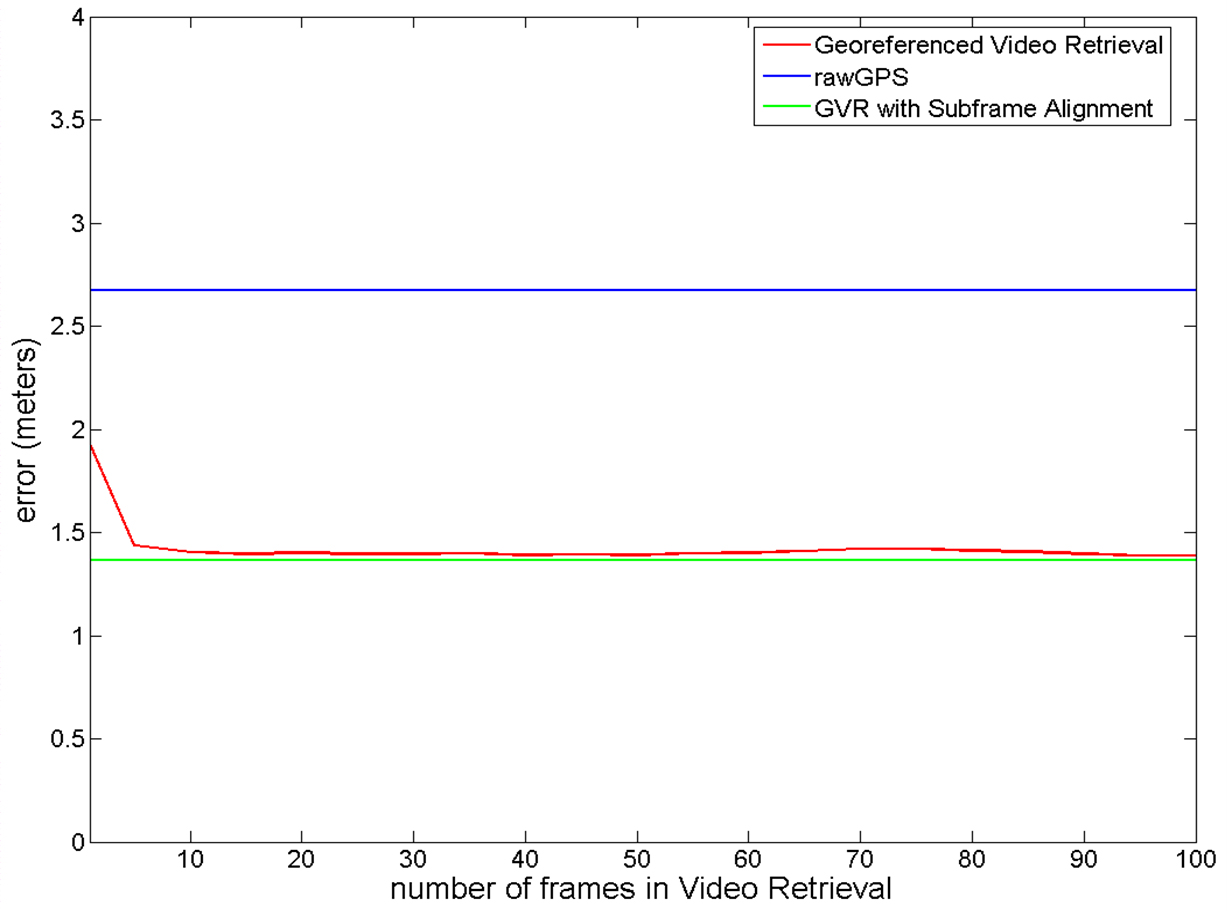
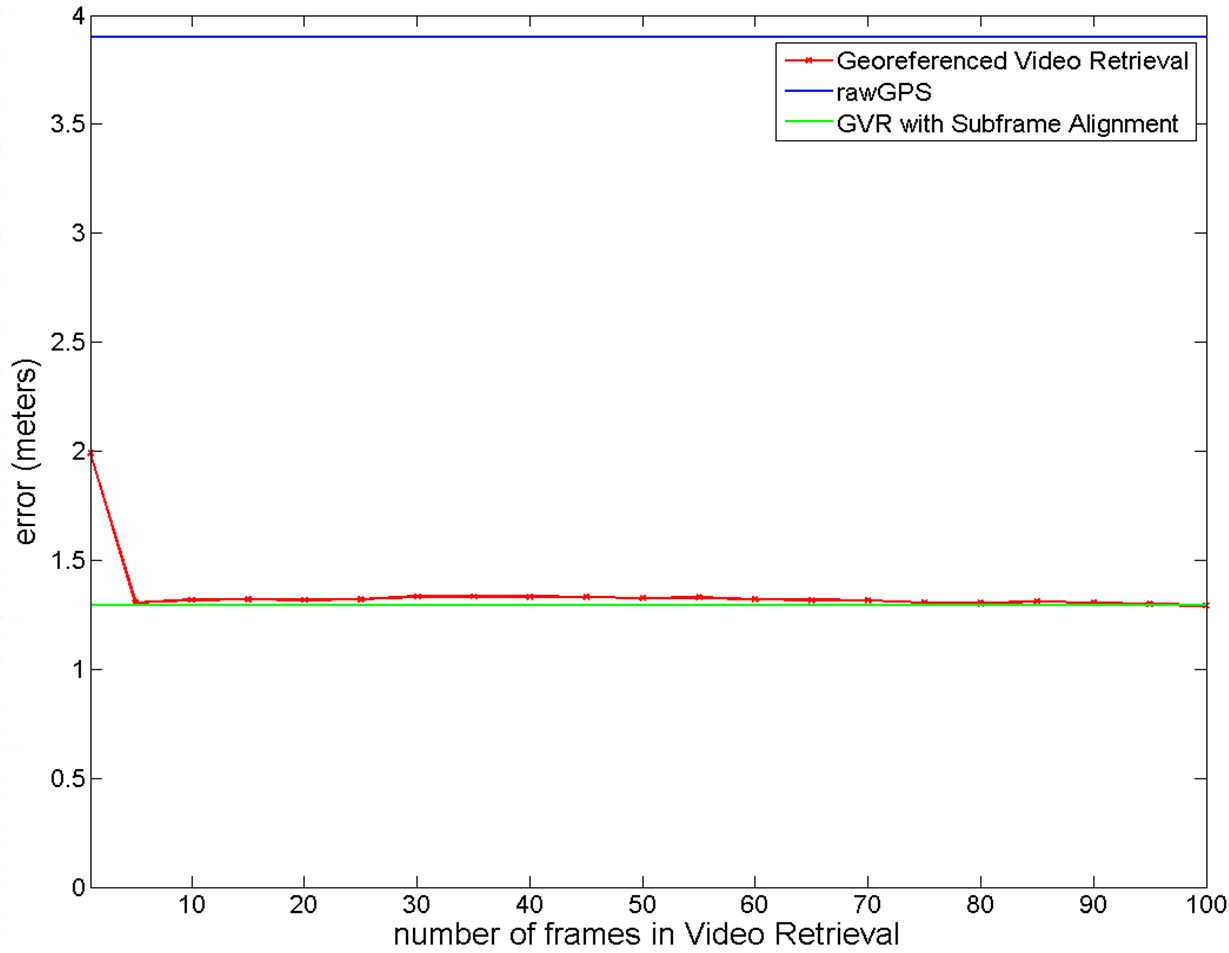
Average error of the inferred geospatial error using the georeferenced video retrieval (GVR) for different number of previous frames L (red), and the consumer GPS (blue) and the GVR with subframe alignment setting L = 100 (green) in:
Campus | Parking | Malaga |
The geospatial information of a vehicle that consists of the transferred GPS, an off–the–shelf consumer GPS and the inferred geolocation after subframe video alignment, to the ground–truth are shown for
Campus | Parking | Malaga |
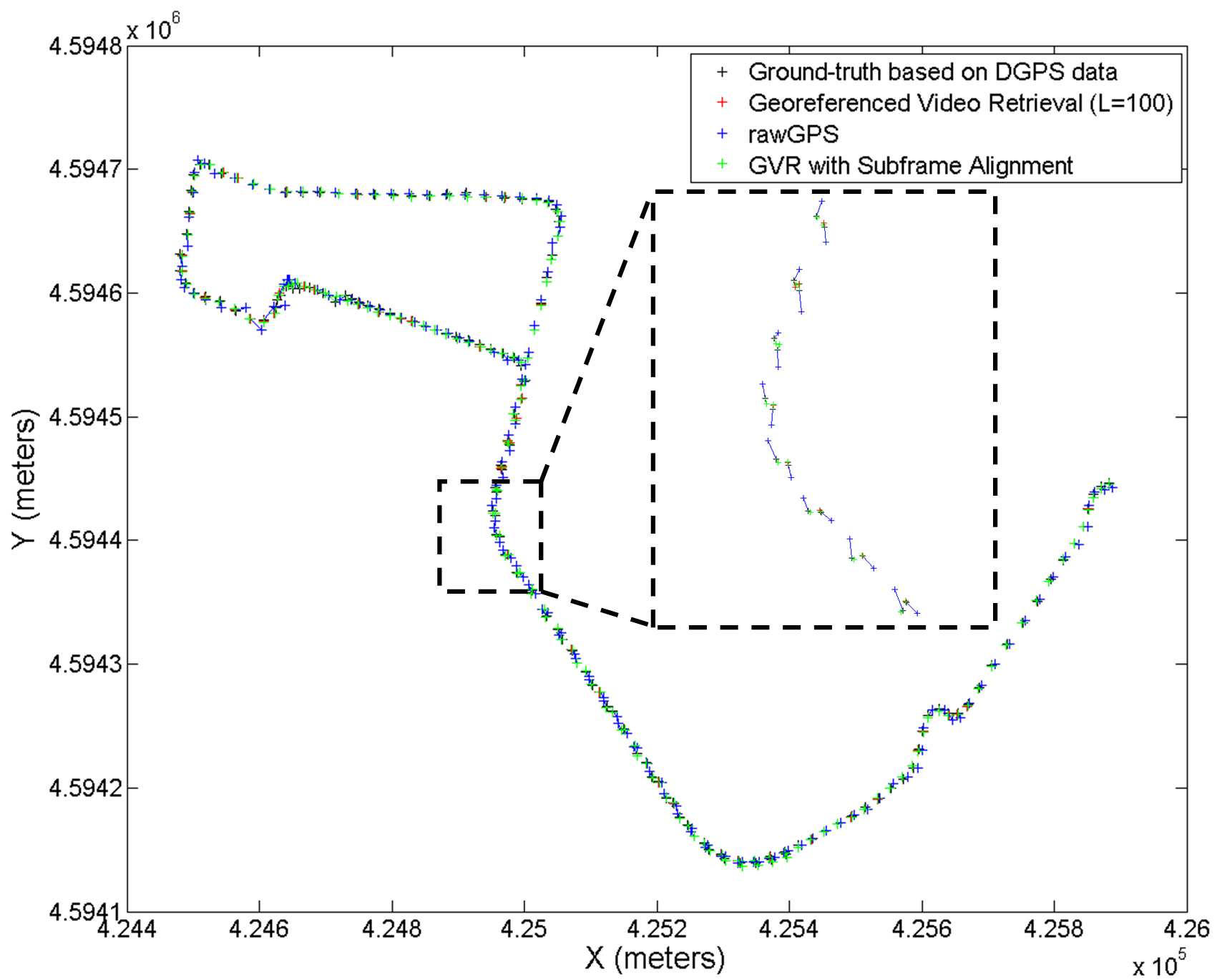
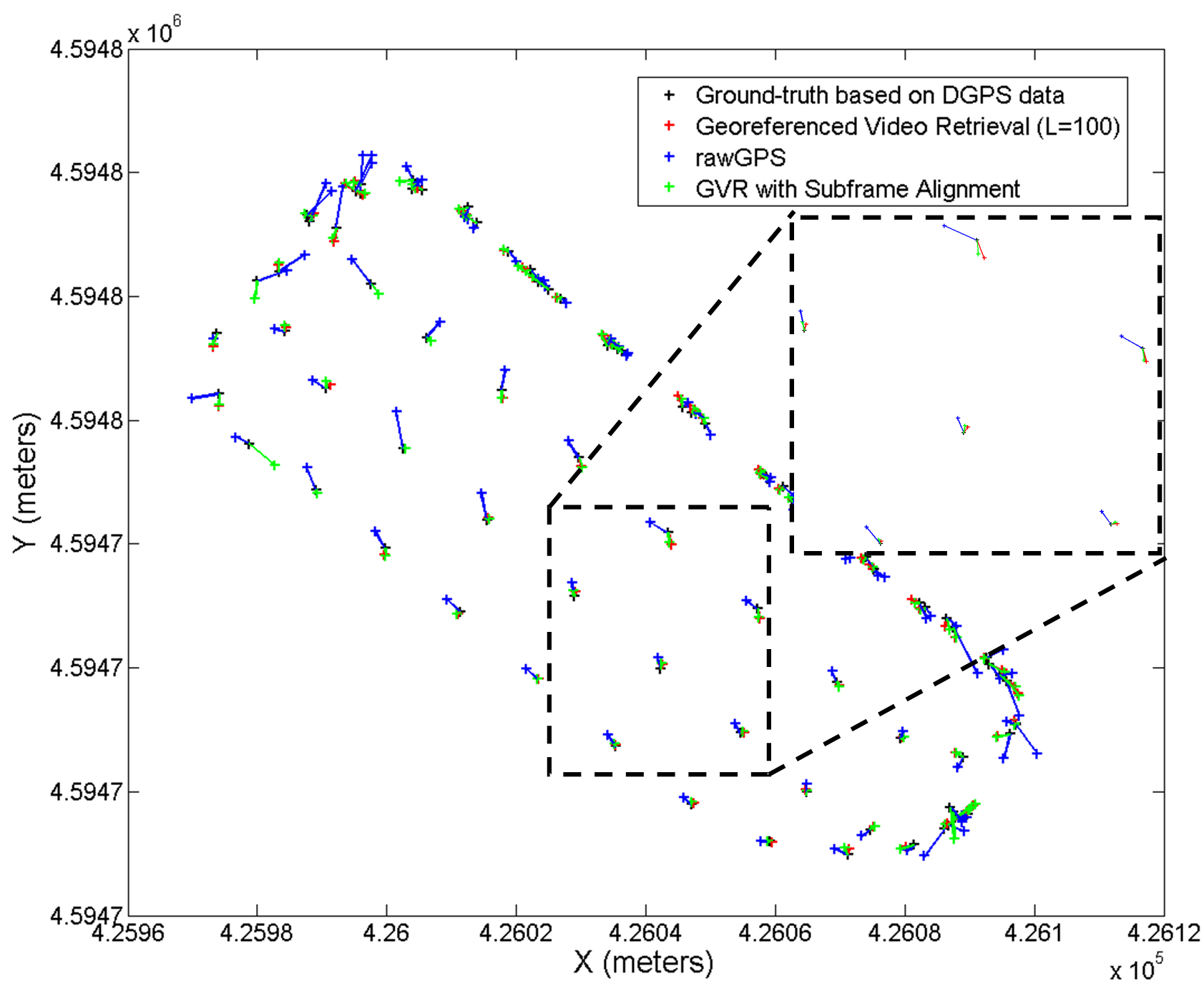
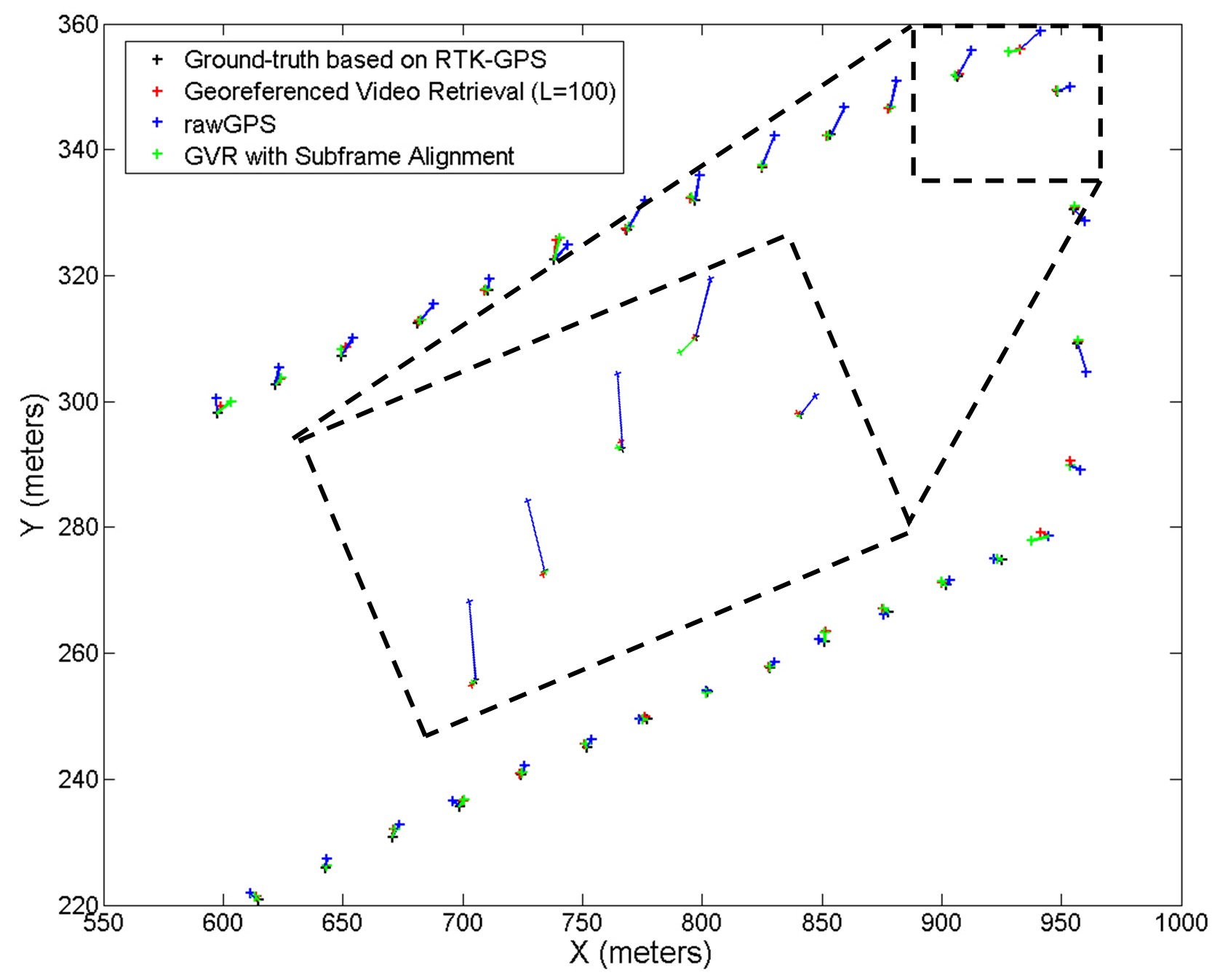
The links relates the corresponding geospatial informations among different geospatial information. The cross points are the geospatial location whereas the lines are their correspondence among geospatial locations.
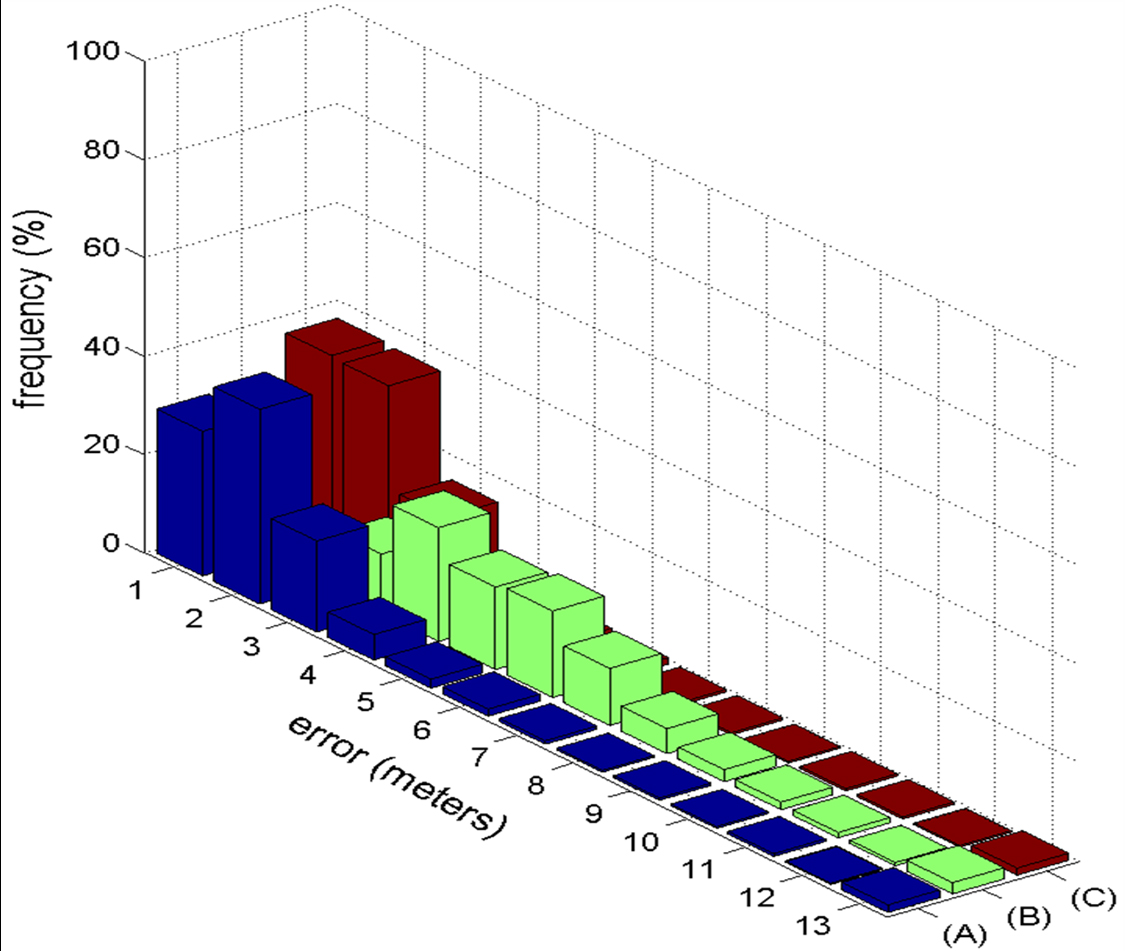
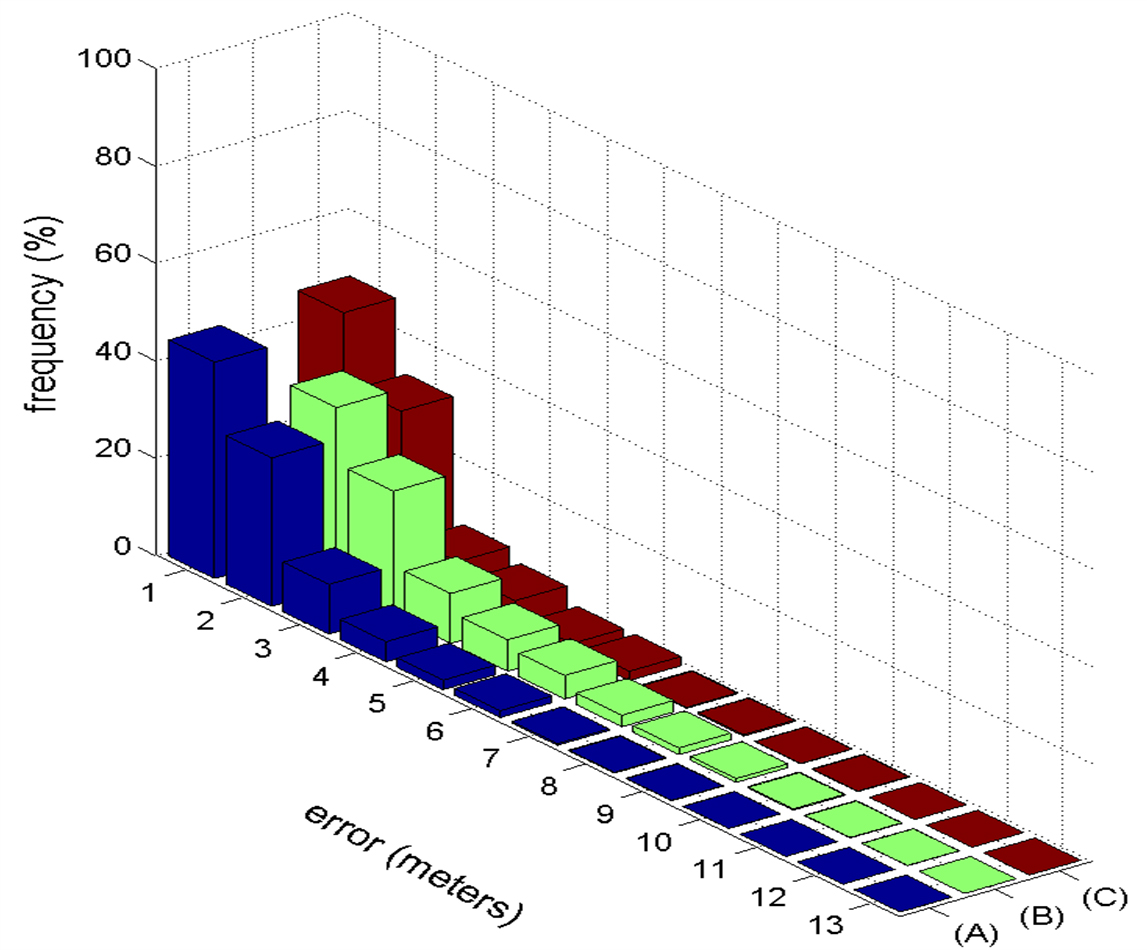
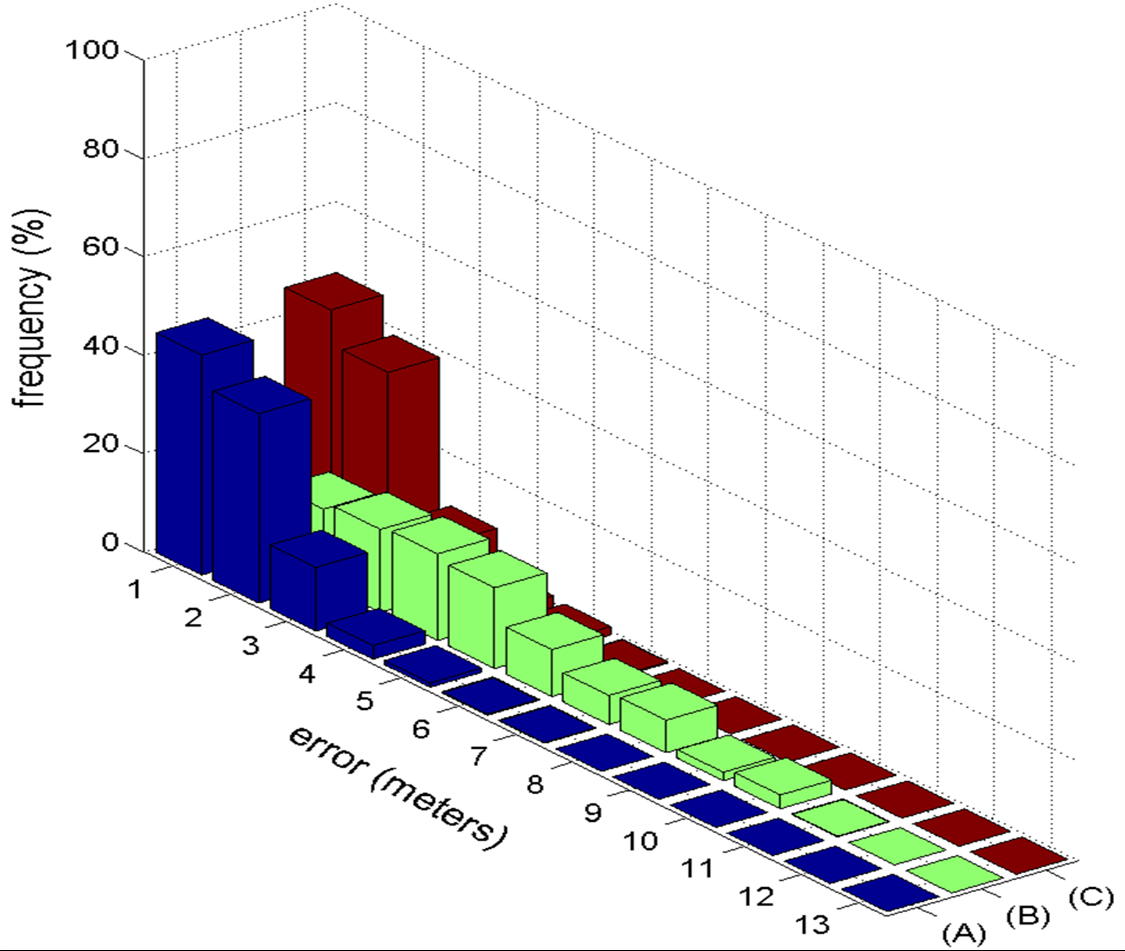
The distribution of the Euclidean distance error between the estimated geospatial and the ground–truth calculated using three estimated geospatial locations: (A) inferred location from a georeferenced sequence, (B) the smoothed raw GPS of a consumer GPS and (C) the inferred geospatial location after the subframe video alignment. Figure scores along x–axis represents the rounded error expressed in meters.
Campus | Parking | Malaga |
Sequences
The algorithm behavior has been tested in three datasets denoted as Campus, Parking and Malaga.
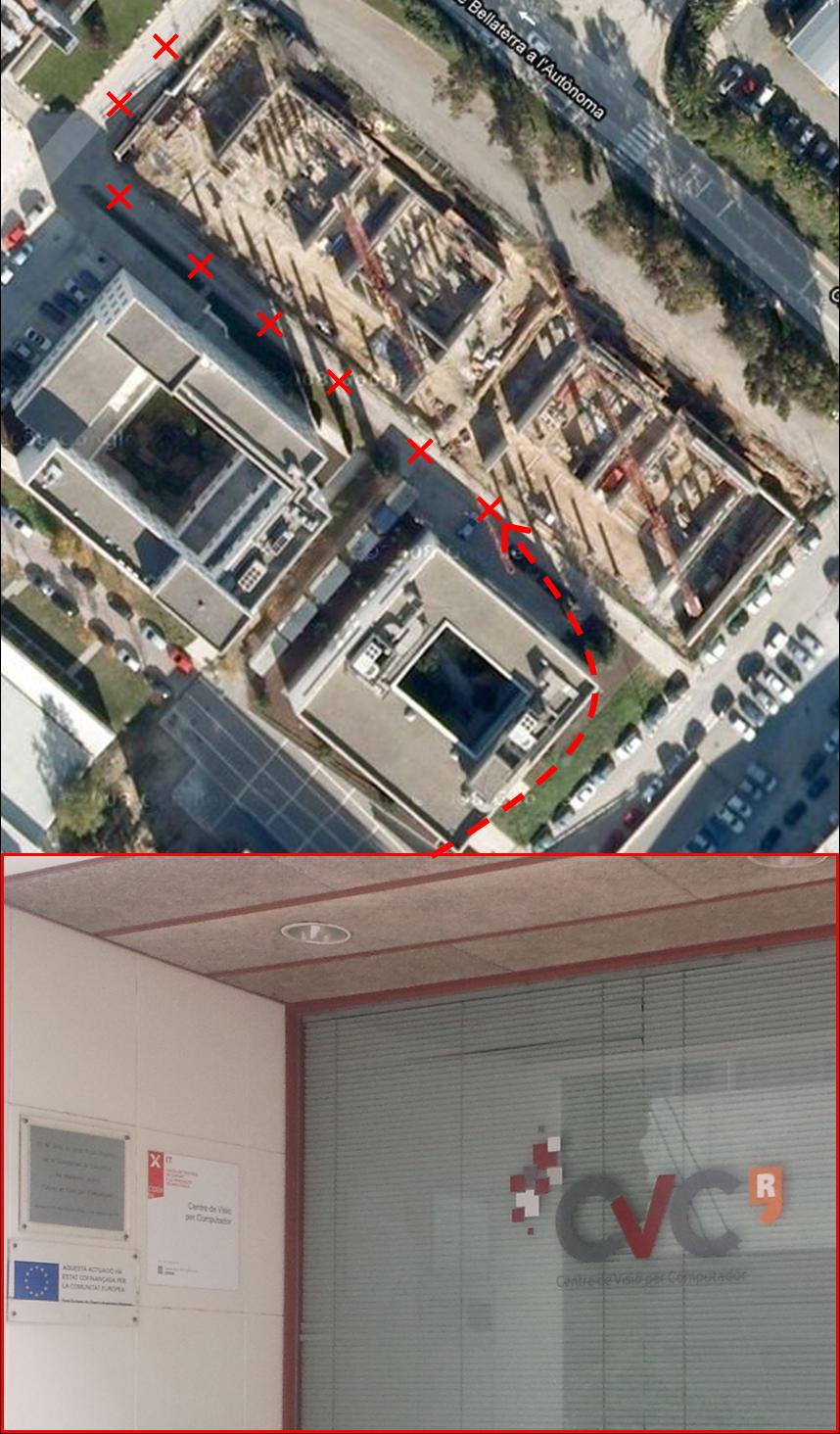
Campus
Topological-Map | New ride | |
| Path of the route |  |
|
| Sequence |
Parking
Topological-Map | New ride | |
| Path of the route |  |
 |
| Sequence |
Malaga
Topological-Map | New ride | |
| Path of the route |   |
 |
| Available at | http://www.mrpt.org/list-of-mrpt-apps/application-graphslamengine/ http://www.mrpt.org/list-of-mrpt-apps/application-graphslamengine/ |
http://www.mrpt.org/list-of-mrpt-apps/application-graphslamengine/ |